 |
 Как обустроить мансарду?  Как создать искусственный водоем?  Как наладить теплоизоляцию?  Как сделать стяжку пола?  Как выбрать теплый пол?  Зачем нужны фасадные системы?  Что может получиться из балкона? |
Главная страница » Энциклопедия строителя
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5]
страница - 1
Дифференциальное уравнение, описывающее движение центра масс генератора, можно получить, основываясь на принципе Даламбера. В данном случае наиболее простым будет уравнение моментов относительно оси подвеса генератора. Для его вывода необходимо получить выражения углов ju1„4 , которые зависят от угла наклона центра масс генератора к вертикали р, положения оси натяжного устройства относительно горизонтали и шкивов друг относительно друга. Рассмотрим геометрические соотношения, возникающие во время движения (колебаний) генератора, что позволит определить jul4 (рис. 4). На рис. 4 представлен случай, когда генератор отклонен от положения равновесия в сторону увеличения р Положением равновесия в данном случае называется такой угол pconst, на который отклонится генератор при достижении требуемого значения силы натяжения ремней.
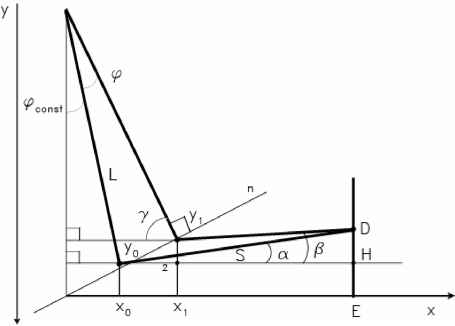
pconst - угол, соответствующий положению равновесия генератора; а - угол наклона ременной передачи к горизонтали при равновесии; в - угол наклона ременной передачи к горизонтали в положении, когда генератор отклонен на угол pconst+ р; y0 D - межосевое расстояние в положении равновесия (S); x0, y0,x1, y1 - координаты центра масс генератора
Рис. 4. Расчетная схема к определению углов во время движения генератора и ременной передачи
Выразим координаты центра масс генератора в зависимости от р:
Х0 = L Sin Pconst , У0 = L C0S Pconst ,
x1 = L sin(pCo„st + p), y = L Cos(pCoJnst + p).
Найдем угол в
в = arctg
( DH - Ил
S1
где h - расстояние от точки 2 до точки (x1, y1), h = y0 - y1. DH = S sina; S1 = S cosa- (x1 - x0). Тогда
в = arctg
S sina + L cos(pconst + p) - L C0S PC
Scosa - Lsin(pconst + p) + Lsinp
const J
Найдем Y:
-V-pconst .
Следовательно:
lh = P + Pconst - arctg
S sina + L cos(pconst +P) - L c0spc
(1)
S cosa - L sin(pconst + P) + L sin Pconst J
Геометрические соотношения при движении центра масс генератора и натяжного устройства несколько отличаются от рассмотренных выше. Натяжное устройство крепится к корпусу генератора, который имеет заданный размер, следовательно точка крепления будет на определенном расстоянии от центра масс генератора. В этом заключается основное отличие от схемы на рис. 4. На рис. 5 представлена расчетная схема к определению углов во время движения генератора и натяжного устройства.
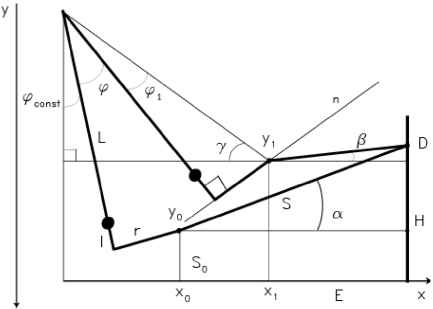
pconst - угол соответствующий положению равновесия генератора; а - угол наклона натяжного устройства к горизонтали в положении равновесия; в - угол наклона натяжного устройства к горизонтали в положении, когда генератор отклонен на угол pconst+ р; y0 D - длина натяжного устройства в положении равновесия (S); x0, y0,x1, y1 - координаты центра масс генератора
Рис. 5. Расчетная схема к определению углов во время движения генератора и натяжного устройства
Выразим положение точки крепления натяжного устройства к генератору в зависимости от р:
Х0 = (L + l)Sin Рconst + Г C0S Pconst ,
У0 = (L + l)C0S Pconst + Г Sin Pconst ,
x1 = (L + I)sin(pconst + P) + Г C0S(Pconst + P) ,
y1 = (L + I)c0s(Pconst + P) + r sin(Pconst + P) .
Следовательно
в = arctg
S sina + (L + I)c0s(Pconst + P) - (L + I)C0S Pconst - Г Sin Pconst + +Г Sin(Pconst +P)
S C0sa - (L + I)sin(Pconst + P) + (L + l)sin Pconst + Г C0S P - Г C0s(Pconst +P)
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5]