 |
 Как обустроить мансарду?  Как создать искусственный водоем?  Как наладить теплоизоляцию?  Как сделать стяжку пола?  Как выбрать теплый пол?  Зачем нужны фасадные системы?  Что может получиться из балкона? |
Главная страница » Энциклопедия строителя
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3]
страница - 0
Анализ процесса преобразования первичной информации в компьютерных системах управления
Бузников С.Е. (inkaplus@yadex.ru)
Московский государственный институт электроники и математики
(Технический университет)
Современный этап развития систем управления объектами технической природы характеризуется возможностями использования практически неограниченных вычислительных ресурсов для решения качественно новых задач управления и обработки информации. В этих условиях открываются реальные перспективы решения актуальных прикладных проблем на качественно новом уровне соотношения технических и программных средств. Одним из наиболее перспективных направлений развития современных систем является создание интеллектуальных систем управления, основанных на использовании математических моделей и алгоритмов косвенных измерений переменных состояния. Ключевое место в технологии косвенных измерений занимает системный анализ свойств объекта управления для решения некорректных задач, к которым сводятся большинство косвенных измерений.
Среди областей применения современных технических систем управления автомобильный транспорт по мировому объему продаж традиционно занимает лидирующее положение. Ежегодный выпуск новых автомобилей превышает 45 млн. единиц, а мировой парк автомобилей ближайшее десятилетие должен превысить один млрд.
Естественно, что проблема безопасности движения в условиях насыщенности дорог автотранспортом затрагивает интересы практически всех членов современного общества и сохраняет мировой уровень значимости как в настоящем, так в обозримом будущем.
Сложность проблемы в научном аспекте определяется тем, что с точки зрения теории управления, объект является не полностью управляемым и не полностью наблюдаемым, а задача предотвращения столкновений в общем случае относится к алгоритмически неразрешимым.
Кроме этого, решение задачи динамической стабилизации, к которой сводится задача предотвращения столкновений в ее наиболее полной алгоритмически разрешимой постановке, характеризуется как неопределенностью некоторых динамических границ, так и их возможными перекрытиями.
В техническом аспекте сложность проблемы определяется отсутствием в мировой практике подавляющего большинства датчиков первичной информации, необходимых для
измерения координат состояния и их динамических границ, а применение существующих ограничивается их стоимостью, тяжелыми условиями эксплуатации, низкой помехозащищенностью, возможностью размещения на объекте и др.
В экономическом аспекте сложность проблемы определяется тем, что создаваемые системы должны обладать определенным набором потребительских показателей, обеспечивающим им достаточно высокий уровень конкурентоспособности среди систем аналогичного назначения.
Одним из перспективных правлений решения проблемы, сложившихся в ведущих развитых странах, является создание систем активной безопасности, предназначенных для решения задач динамической стабилизации в частных постановках.
Среди систем активной безопасности особое место занимают интеллектуальные системы, обладающие набором рекордных [1] потребительских показателей, придающих им высший уровень конкурентоспособности.
К числу такого рода рекордных интеллектуальных систем относится разработанные последнее десятилетие в России ИНКА-системы [2], обеспечивающие решение задачи предотвращения столкновений в ее наиболее общей алгоритмически разрешимой постановке в минимально возможной конфигурации [3] технических средств.
Принцип действия ИНКА-систем активной безопасности основан на решении в реальном времени задачи динамической стабилизации координат состояния автомобиля как объекта управления.
Для решения этой задачи в ИНКА-системах используются оригинальные математические модели и алгоритмы виртуальных преобразователей [4] практически всех переменных состояния, обеспечивающих высокоточные косвенные измерения.
В число косвенно измеряемых переменных входят:
•давления воздуха в шинах;
•температуры перегрева шин и тепловые составляющие давлений;
•статические радиусы и износы кордов шин;
•скорости, ускорения и расстояния, пройденные каждым колесом и центром масс автомобиля;
•углы поворота и схождения управляемых колес;
•дополнительные углы развала колес;
•тяговые и тормозные усилия, действующие на колеса;
•мгновенная мощность, развиваемая двигателем;
•скорости продольных скольжений колес и вращения центра масс.
При построении многофункциональных систем управления достаточно высокого
интеллектуального уровня, характеризуемых минимально возможным составом технических
средств, решение задачи выбора датчиков первичной информации играет ключевую роль. Это объясняется тем, что проведение косвенных измерений координат состояния объекта управления с применением математических моделей и алгоритмов виртуальных преобразователей сопряжено с появлением дополнительных составляющих ошибок, которые добавляются к ошибкам первичных измерений. Для того, чтобы результирующая ошибка косвенных измерений не превышала некоторого достаточно малого допустимого уровня, ошибки первичных измерений должны быть минимальными.
В этом смысле значительный прикладной интерес представляют условия существования нулевых ошибок первичных измерений, для определения которых требуется проведение анализа погрешностей с использованием математических моделей преобразования данных в измерительной части системы управления.
Типовая схема автоматизированной системы управления с датчиком первичной информации параметрического типа, линией связи, управляющим компьютером с аналого-цифровым преобразователем (АЦП) и устройством отображения информации (УОИ) оператору приведена на рис. 1
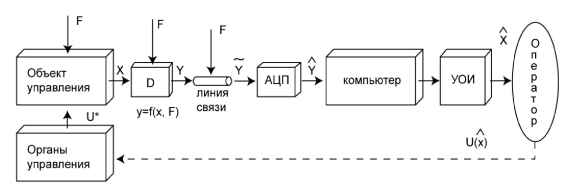
Рис. 1. Типовая схема автоматизированной системы управления объектом.
В общем случае, оценка x координаты состояния объекта x, отображаемая оператору, содержит статическую Ec и динамическую Eg ошибки.
Л
Так, оценка x(t + г), отображаемая оператору с запаздыванием на время ввода-вывода и обработки данных, содержит величину x(t) и Ec(t) в момент времени измерения t и равна
Л
x(t + г) = x(t) + Ec (t) . Координату состояния x(t + г) в момент времени (t + г) представим
00 гг drx(t)
разложением в ряд Тейлора в момент времени t в виде x(t + г) = x(t) + ^ —
r! dtr
Ошибка оценивания в момент времени (t + г) равна:
0 г r drx(t)
E(t + г) = x(t + г) - x(t + г) = Ec(t) + Eg(t), где Eg (t) =• —ii
r! dtr
r=1
r=1
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3]