 |
 Как обустроить мансарду?  Как создать искусственный водоем?  Как наладить теплоизоляцию?  Как сделать стяжку пола?  Как выбрать теплый пол?  Зачем нужны фасадные системы?  Что может получиться из балкона? |
Главная страница » Энциклопедия строителя
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15] [стр.16] [стр.17] [стр.18] [стр.19]
страница - 2
как). Задача для экспериментатора состоит в расшифровке «послания от животного» с помощью определенных вычислительных приемов.
Поведенческая модель
Наша лабиринтная поведенческая модель [Никольская, Сагимбаева, 1974] основана на концепции, что любая проблемная ситуация может рассматриваться как «лабиринтная ситуация», так как количество возможных решений, которые исходно существуют первоначально не известно [Арбиб, 1972].
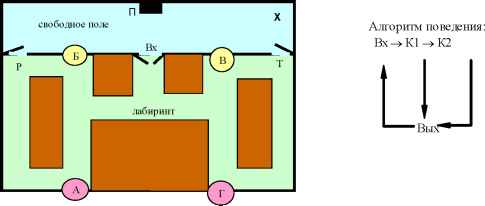
Рис. 1. Схема экспериментальной среды для наземных млекопитающих.
Вх- вход в лабиринт; А и Г- истинные кормушки (К1 и К2), в которых предъявлялся корм; Б и В - ложные кормушки; P и T - выходы из области лабиринта в свободное поле (непищевая среда); П - полка, нажав на которую животное может открыть себе дверь в лабиринт, Х -стартовое положение животного в начальный момент опыта. Животные должны были самопроизвольно сформировать 4-звенный пищедобывательный навык в циклической форме. Объяснение в тексте.
Экспериментальная среда для наземных млекопитающих и для рыб состояла из двух частей - свободного поля и лабиринта, которые были связаны между собой тремя дверями: вход в лабиринт и два выхода из него (рис. 1). Входная дверь открывалась однонаправлено, к лабиринту, немедленно как только животное приближалось к ней в процессе обследования свободного поля. Двери выходов открывались в сторону свободного поля как только животное подходило к ним. Имелись две «истинные» кормушки (А и Г), где предъявлялась пища, согласно правилу задачи, и две «ложные» кормушки, в которых пища не предъявлялась в процессе обучения (Б и В). Животные могли двигаться свободно по всему экспериментальному пространству. Использовали метод свободного выбора, сущность которого состояла в том, что вся информация о задаче предъявлялась в первом опыте и никакие фазические стимулы или подсказки экспериментатор не применял, а только наблюдал за происходящим в камере.
Сложность семантики задачи была рассчитана таким образом, чтобы можно было выявить способность животного прогнозировать результат действия, являющегося самым высоким уровнем интеллектуальной активности, согласно представлениям Анохина [1968]. Предлагаемая животным задача заключалась в следующем: животное, помещенное в установленное место в пределах свободной поля должно было самопроизвольно приблизиться к входной двери, которая сразу же или после нажатия на полку открывалась, и войти в лабиринт. Войдя, животное могло посетить одну или две «истинных» кормушки, после чего животное должно было самопроизвольно выйти из лабиринта в свободное поле без какого-
либо условного раздражителя. Таким образом, для того чтобы получить пищу повторно, животное должно было оставить пищевую область (лабиринт) после получения подкрепления и затем заново войти в лабиринт. Количество порций пищи, которое могло получить животное, было ограничено лишь временем опыта и исключительно зависело от активности животного.
Чтобы всегда иметь доступ к пище, животные должны были решить три проблемы в процессе обучения. (1) Определить пространственную структуру лабиринта, содержащую набор симметричных проходов. (2) Выяснить логику (структуру) задачи, т. е план поведения и (3) сформировать устойчивый оперантный навык. Пространственная сложность экспериментальной среды определялась количеством разветвленных отсеков в лабиринте (общее количество - 19), каждый из которых мог разветвляться от 2 до 4 возможных направлений (рис. 2).
A
B
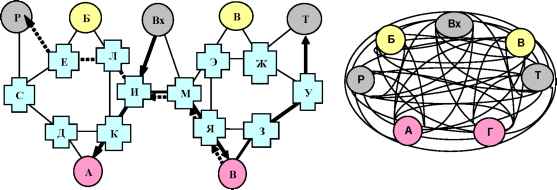
Рис. 2. Пространственная (синтаксическая) и семантическая сложность задачи.
A. Разнообразие альтернативных маршрутов решения задачи. Розовые круги - истинные кормушки, желтые -ложные, серые - входная и выходные двери, голубым цветом показаны перекрестки лабиринта. Количество простых маршрутов составляло 1912 - 1915, поскольку в лабиринте имелось 19 зон/отсеков. Правильное минимизированное решение должно было состоять из 12 зон/отсеков: Вх—ИКА+КИМЯГ+ЗУТ—^Свободное поле (сплошная линия). Рациональное решение могло быть составлено из 15 зон/отсеков:
Вх—ИКА+КИМЯГ+ЯМИЛЕР (сплошная и пунктирная линии). B. Семантическая сложность задачи. Общее количество семантических решений равнялось 74, поскольку среда содержала семь семантических элементов: вход, четыре кормушки и два выхода.
Семантическая трудность задачи состояла в обнаружении правильной последовательности из четырех семантических элементов среди 74 (2401) возможных комбинаций. При подсчете структурной сложности лабиринта были использованы некоторые положения теории графа [Swamy и Thulasiraman, 1981]. Лабиринт, используемый для наземных млекопитающих имел 14 альтернативных зон со средним коэффициентом перехода 2.5, и количество простых ориентируемых маршрутов составляло 130 (рис. 1). Переход от одного семантического элемента к другому был обозначен как звено задачи. Под алгоритмом поведения понимали выполнение упорядоченной последовательности звеньев. Маршрут, начинающийся на входе в лабиринт (Вх) и заканчивающийся на выходе в свободное поле (Р или T) был определен как решение задачи. В соответствие с достижением цели (взятия пищи или нет) решение задачи
могло быть классифицировано по типу траектории (минимизированное, рациональное или нерациональное) и качества действий (иррациональное, правильное или ошибочное). Пространственная сложность экспериментальной среды определялась геометрической конфигурацией и числом связей (ребер) между вершинами его графа, так как число семантических элементов во всех лабиринтных средах было постоянно. В качестве меры пространственной сложности была использована величина неопределенности выбора маршрутной реализации при осуществлении двигательного навыка, которая учитывала как количество альтернативных зон в лабиринте, так и коэффициент разветвления. Полная неопределенность выбора была определена по формуле Шеннона [Shannon, 1949]: НВ =
Nk
УPt log2 Pt; где pi - вероятность i-решения, Nk - допустимое число решений. Величина НВ
используемого для наземных млекопитающих составляла 48.8.
Чтобы решить задачу, животное было должно построить пространственную "карту" среды, распознать структуру задачи и сформировать последовательность действий, приводящую к успеху. Таким образом, в процессе обучения животное должно было вывести правило: после получения пищи в лабиринте необходимо самопроизвольно покинуть его для того, чтобы иметь возможность получить следующую порцию пищи при повторном заходе в лабиринт. Время опыта было определено опытным путем, учитывался уровень двигательной активности для каждой группы животных в первом опыте.
После завершения обучения на этапе стабилизации навыка проводили два вида тестирования поведения животных, направленных на оценку пластичности сформированного поведения у крыс (1-й тест) и «понимания» правила задачи (2-й тест). В первом тесте использовали барьер - перегородку, неожиданно появлявшуюся на пути типичного следования животного, для того, чтобы вынудить крысу использовать обход (ранее знакомый, но более длинный маршрут) для достижения пищи или выходной двери. Второй тест был связан с изменением информационного значения ложных и истинных кормушек, истинные становились ложными (вариант переделки навыка). Этот тест был направлен на исследование способности животных применить свое понимание правила задачи к новой ситуации. Если семантика задачи оставалась той же самой (есть две порции пищи, доступные при каждом посещении лабиринта), то измененное местоположение пищи было пространственной, но не познавательной проблемой. Поэтому, как только новое местоположение пищи было установлено, предварительно сформированная поведенческая программа могла быть применена.
Анализ данных
С помощью оригинальной компьютерной программы регистрировали и анализировали различные поведенческие параметры (условнорефлекторные и безусловнорефлекторные), которые приведены в таблице 1.
Благодаря методике свободного выбора животные могли корректировать свои ошибки, поэтому каждый опыт мог состоять из правильных и ошибочных действий. Мы выделили два типа ошибок (Ош): (1) приближение к «ложной» кормушке до или после получения укрепления - ОшЛ; (2) повторные подходы к «истинным» кормушкам после получения подкрепления до того как животное покинет лабиринт - ОшП. Возвраты к входной (Вх) и выходным дверям (P и/или T) в пределах одной пробы в ходе перемещения по лабиринту были определены как новые попытки. На основе первичных показателей высчитывали интегральные показатели, которые учитывали бы не только количество и продолжительность действий, но и
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15] [стр.16] [стр.17] [стр.18] [стр.19]