 |
 Как обустроить мансарду?  Как создать искусственный водоем?  Как наладить теплоизоляцию?  Как сделать стяжку пола?  Как выбрать теплый пол?  Зачем нужны фасадные системы?  Что может получиться из балкона? |
Главная страница » Энциклопедия строителя
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3]
страница - 2
о
- | *- Ут | |||||
v | ||||||
Угр Fmax | ||||||
x | ||||||
Xk-i h хкh xk+1
Рис. 2. Зависимостьy(x) для датчика событий
л
В условиях действия аддитивных шумов измерений F(k), y(k) = y(k) + F(k) и в счетчике событий могут возникать ошибки оценивания первого и второго рода, соответствующие ложной тревоге и пропуску событий. Для негауссовского шума измерений Fmin < F(k) < Fmax можно сформулировать условия, при которых ошибки первого и второго рода не возникают.
л
Так, ошибка первого рода (ложная тревога) возникает в (6), если y(k) > yгр при y(k) = 0. Если Fmax < угр, то такая ошибка не может происходить. Ошибки второго рода (пропуск
л
событий) возникают, если y(k) < угр при y(k)= ym .
Если ym+Fmin > угр, то ошибки второго рода также не происходят. Следовательно, при выполнении условия:
Fmax< угр < (ym + Fmin),(7)
ошибки первого и второго рода не возникают.
На рис. 2. приведены значения Fmax и Fmin , соответствующие этому случаю.
л
Таким образом, при выполнении условия (7) x(k) = x(k) при Fmin< F(k) < Fmax , что объясняет качественно более высокий уровень помехозащищенности систем с импульсной модуляцией сигналов по сравнению с аналоговыми.
*лл
Компенсация динамической ошибки Eg(t + т) = т[x(t)-x&(t)] при экстраполяции x(t) на т запаздывания достигается при x(t) = const.
л
Для интервальных оценок A x(tk +тк) и собственно интервалов Ax(tk+ tk) справедливы следующие соотношения:
м4 +т ) = [х(Ч +4 ) - АЧ-пг + 4-m)] = х (tk )-x(tk-m ), m
A(tk +4 ) = [x(tk +т ) - АЧ-m + 4-m )]= 44 ) - х( tk-m) + TkX( tk )-тк-пх ( tk-m).
Ошибка оценивания в момент времени tk + тк равна :
л
AE(tk + тк ) = А X(tk + тк ) -Ax(tk + тк ) = тк-тх(1к-т ) -ткх(tk ) и обращается в ноль при
тк = тк-m и х(tk) = х(tk-m), и в этом случае не требуется какая-либо дополнительная компенсация динамической ошибки.
При конечных k0 Фа для импульсов треугольной формы , амплитуда которых пропорциональна х , на линейном участке y = ^хх, а величина тпри х=х т определяется из условия угр = k0 х2 т и составляет величину т = yip/(k0 х2).
х(tk ) и х(tk-m ), достигая исчезающее малых величин AE «0 и при х(tk ) Ф х(tk-m ) .
Отмеченные свойства интервальных оценок, формируемых с помощью датчиков событий выделяет этот класс датчиков первичной информации среди остальных, так как позволяет с их помощью обеспечить измерение интервалов Ах с ошибками AE (t+ т) =0 даже в условиях шумов измерений и конечных запаздываний.
Датчики первичной информации индукционного типа (рис.3), применяемые в ИНКА-системах, состоят из катушки (4), располагаемой на пластмассовом каркасе (3), с внутренним ферромагнитным сердечником (2), устанавливаемой на тормозных щитах с помощью специальных кронштейнов и постоянных магнитов (1), наклеиваемых на внутренней поверхности обода.
Выводы обмотки датчика с помощью разъемов (5) коммутируются с блоком обработки и отображения информации с помощью кабеля связи.
Для защиты от механических повреждений и иных воздействий внешней среды обмотка
Угр [ *(tk ) - х(tk-m )]
асимптотически стремится к нулю с ростом
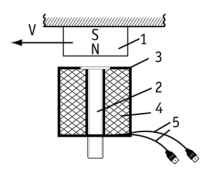
датчика заливается ударопрочным компаундом.
Принцип действия рассматриваемого датчика основан на явлении электромагнитной индукции. При вращении колеса в витках w обмотки наводится
пропорциональная линейной скорости перемещения магнита У=(1х/Л относительно катушки.
dtdx dt
Рис.3 Конструкция датчика
индукционного типа,
Форма импульсов E(t) повторяет распределение dФ /Лх и представляет собой последовательность полуволн
применяемого в ИНКА-
системах.
противоположного знака. Импульсы одного знака формируются датчиком с периодом Аф =2п/М, где М - число магнитов, равномерно расположенных на внутренней поверхности обода. Датчик рассматриваемого типа представляет собой частный случай датчика событий.
Амплитуда импульсов напряжения ym линейно зависит от скорости V и аппроксимируется кривой типа «локона Аньези» вида:
к ■ V
[1 + k 22 Ахг2]
(8)
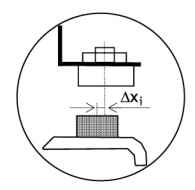
где Ах; - величина несоосности магнита и катушки i-го датчика, k1 и k2 - коэффициенты, учитывающие влияние V и Ахг- на амплитуду импульса ym.
На рис.4 приведена схема установки датчика на колесе автомобиля.
Счетчик событий изменяет свое состояние при ym> угр, что позволяет оценивать величину Ахг при известных угр , k1, k2 и Уггр=Уг с помощью идентифицированной модели преобразования сигналов датчика, получаемой из (8):
Г
Re
■V
y
1
ад
(9)
Рис.4 Схема установки датчика на колесе Изменения величины Ах; может происходить в случае автомобиля.самопроизвольного или умышленного отворачивания крепежных
болтов колеса, что приводит к отсоединению колеса от ступицы в движении и создает предпосылки для типового столкновения. Если выполняется Ах; < Ахгр, то подобная ситуация исключается, а нарушение этого условия позволяет обнаружить опасную неисправность на ранних стадиях и предотвратить ее последствия.
Проведенный анализ погрешностей преобразования данных в системах с датчиками первичной информации параметрического типа позволяют сформулировать следующие выводы:
•результирующая ошибка измерений в системах с датчиками параметрического типа, функционирующих в режиме непрерывного преобразования при конечных коэффициентах усиления k0 и малой размерности вектора F внешних воздействий, представляет собой негауссовский шум измерений, для которого условия существования нулевых ошибок в общем случае не выполняются;
•компенсация влияния внешних воздействий на ошибку измерений предполагает введение в состав технических средств дополнительных датчиков первичной
Ах = k
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3]