 |
 Как обустроить мансарду?  Как создать искусственный водоем?  Как наладить теплоизоляцию?  Как сделать стяжку пола?  Как выбрать теплый пол?  Зачем нужны фасадные системы?  Что может получиться из балкона? |
Главная страница » Энциклопедия строителя
содержание:
[стр.Введение] [стр.1]
страница - 0
CALS-система разработки бортовых управляющих
программ
Калентьев А.А., Трусов В.С. (vitalyt@bee-s.com), Тюгашев А.А. Самарский государственный аэрокосмический университет
Концепция CALS - Computer-aided Acquisition and Logistic Support -компьютерная поддержка процессов поставок и логистики, зародилась в 80-х годах в военном ведомстве США как подход к повышению эффективности управления и планирования госзаказов с целью сокращения затрат на организацию информационного взаимодействия государственных учреждений с частными фирмами при формализации требований, заказа, поставок и эксплуатации военной техники. Доказав свою эффективность, концепция прошла путь последовательного совершенствования и, сохранив аббревиатуру CALS, получила более широкую смысловую трактовку - Continuous Acqusition and Life cycle Support - непрерывные поставки и поддержка жизненного цикла продукции.
В нашей стране также проводится разработка и внедрение CALS систем. Их заказчиками являются крупные предприятия оборонной промышленности и близких к ней отраслей, таких как космическая, авиационная /3/. В данной статье предлагается CALS-система разработки управляющих программ для летательных аппаратов.
Современные летательные аппараты являются классическим примером сложных технических систем, состоящих из большого числа различных подсистем, приборов и датчиков. Для синхронизации работы и эффективного управления всеми приборами и агрегатами аппарата все его управляющие функции сосредоточены в бортовом вычислительном комплексе /2/.
Бортовой вычислительный комплекс должен обеспечивать синхронную и бесперебойную работу всего комплекса бортовой аппаратуры с целью выполнения программы полета и решения целевых задач, возникающих на разных этапах полета. Все эти функции реализуются управляющей программой, загруженной в память бортового вычислительного комплекса. Обычно выделяют несколько управляющих программ, предназначенных для координации действий бортовой аппаратуры в одном из режимов функционирования летательного аппарата. Такие алгоритмы называются алгоритмами режима.
Современные управляющие алгоритмы режимов состоят из сотен тысяч строк кода. Разработка таких алгоритмов - сложная и трудоемкая задача, в связи с этим актуальной остается задача простого и удобного их описания и автоматизации их создания на всех этапах жизненного цикла алгоритма.
Согласно ЕСПД, жизненный цикл управляющего алгоритма режима можно представить в следующем виде.

Рис. 1 - Этапы жизненного цикла управляющего алгоритма
В настоящее время создание управляющих алгоритмов режима происходит по следующей схеме. На начальном этапе выдвигаются некоторые требования к режиму и особенностям функционирования летательного аппарата в этом режиме. Затем инженер-конструктор проектирует алгоритм, описывая требования к нему на естественном языке. При этом он руководствуется, в основном, логикой управления бортовой аппаратурой при решении той или иной задачи в рамках режима. Основными при этом являются логические связки согласования по времени выполнения отдельных частей алгоритма.
Готовое описание алгоритма передается непосредственным разработчикам, которые на его базе должны создать текст программы на языке ассемблера, а также составить программную документацию на алгоритм, включающую временную диаграмму и блок-схему. Затем программа, реализующая алгоритм, отлаживается на эмуляторах и, если необходимо, дорабатывается. На последней стадии программа должны быть загружена в ПЗУ бортового вычислительного комплекса и протестирована.
Учитывая большое число приборов и подсистем, нуждающихся в синхронизации и управлении, становится очевидной сложность управляющего алгоритма. Требования к алгоритмам режима, составляемые на начальном этапе разработки, нередко занимают более трех десятков страниц текста. При этом крайне высока цена ошибок в алгоритме, ведь даже небольшое нарушение в синхронизации может повлечь потерю летательного аппарата.
Естественно, разработка алгоритмов режима является достаточно трудоемкой задачей, требующей автоматизации. При этом, учитывая большое количество людей, занятых в проектировании и разработке алгоритмов режима, становится очевидной необходимость создания интегрированной информационной среды, позволяющей охватить все стадии жизненного цикла алгоритмов режима. Таким средством является CALS-система ГРАФКОНТ, разрабатываемая и внедряемая сотрудниками Самарского государственного аэрокосмического университета.
Система ГРАФКОНТ представляет собой комплекс программ, предназначенных для разных стадий разработки и обменивающихся друг с другом данными в соответствии с ЕСПД. Все данные об алгоритме на каждом
шаге хранятся и передаются в виде информационных объектов. Основные модели и структуры данных системы ГРАФКОНТ представлены на рисунке 2.
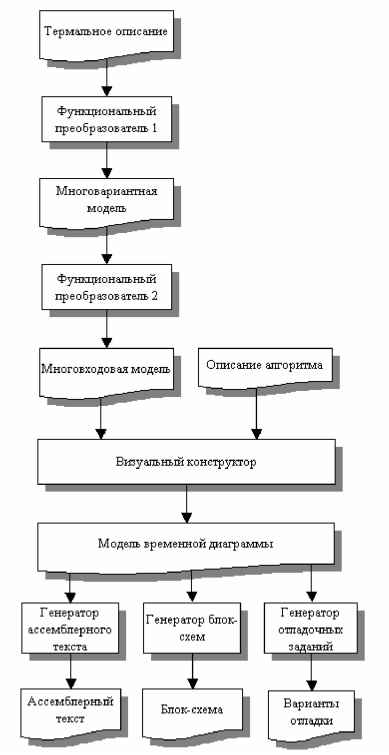
Рис. 2 - Структура системы ГРАФКОНТ
С помощью модулей системы ГРАФКОНТ инженер конструктор уже на начальном этапе может формализовать требования к алгоритму и представить их в виде термального описания. Термальное описание алгоритма строится на базе формальной теории разработанной А.А. Калентьевым и описанной в /1/.
содержание:
[стр.Введение] [стр.1]