 |
 Как обустроить мансарду?  Как создать искусственный водоем?  Как наладить теплоизоляцию?  Как сделать стяжку пола?  Как выбрать теплый пол?  Зачем нужны фасадные системы?  Что может получиться из балкона? |
Главная страница » Энциклопедия строителя
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15]
страница - 12
скаются двух типов: МЭМ-4 и МЭМ-10. Цифры 4 и 10 означают значение номинального крутящего момента. Механизмы имеют модификации, отличающиеся номинальным временем полного хода выходного вала (25, 63, 160 и 400 с) и номинальным полным ходом выходного вала (10, 25 и 63 оборотов).
Шифр модификации определяет эти номинальные значения. Например, шифр механизма МЭМ-10/63-25 обозначает, что он имеет номинальный крутящий момент на отходном валу 10 Нм, время полного хода 63 с и полный ход 25 оборотов.
Механизмы имеют короткозамкнутый трехфазный асинхронный двигатель типа АОЛ с электромагнитным тормозом типа ББТ-2.
Механизмы имеют два датчика: БДИ-6 или БДР-П. Один датчик используется в качестве указателя положения МЭМ, а второй (в схеме регулирования) — в качестве обратной связи по положению регулирующего органа.
Принципиальные электрические схемы МЭМ представлены на рис. 13.12. Схемы соединений реостатных датчиков КДР1 и КДР2 типа БДР-П и индукционных датчиков ДИ1 и ДИ2 типа БДИ-6 механизма МЭМ аналогичны схемам их соединений механизма МЭО (см. рис. 13.6).
Расположение выходного вала механизма при установке на рабочий орган вертикальное. Допускается расположение вала наклонно под углом не более 15° к вертикали.
Внешние электрические соединения механизма должны осуществляться с помощью кабельных линий через сальниковые вводы. Провода внешней цепи медные сечением до 1,5 мм1
Регулируемый исполнительный механизм задвижек РИМЗ. Механизм предназначен для дистанционного управления шиберными задвижками с поступательным перемещением рабочего органа.
В зависимости от полного хода рабочего органа исполнительный механизм изготавливается следующих модификаций: РИМЗ-1 с полным ходом 220 мм; РИМЗ-2 с полным ходом 300 мм; РИМЗ-3 с полным ходом 500 мм. Время полного хода рабочего органа 10 с. Механизм имеет асинхронный трехфазный электродвигатель АОЛ-21-4 и реостатный датчик положения. Вращение от электродвигателя передается через редуктор ходовому винту. На винте расположена гайка с поводковым пальцем, который предназначен для сочленения РИМЗ с шибером задвижки.
При вращении электродвигателя в ту
5Д
1 Si 2
т
Ч(от\
3 Зг i, L_J
/ - 3 2
1
Г
3 Stt t
КДИ(ДИ1)
кдргшигу.
Si
гго/тв
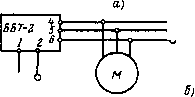
Рис. 13.12. Принципиальные электрические
схемы механизмов МЭМ: а — схема подключения датчиков и микропереключателей ; 6 — схема включения электродвигателя М с электромагнитным тормозом ББТ-2; БД— блок датчиков; S -S - микропереключатели; 5, -тумблер; КДР1 (ДйУ; - реостатный (или индукционный) датчик положения; КДР2 (ДИ2) — реостатный (или индукционный) датчик обратной связи; X — колодка зажимов МЭМ
ИЛИ другую сторону гайка совершает возвратно-поступательное движение вдоль винта, обеспечивая открытие или закрытие задвижки. На винте расположен поводок, который при вращении винта перемещается на расстояние, пропорциональное перемещению рабочего органа, и в крайних положениях воздействует на концевые выключатели. На поводке расположена контактная пластина реостатного датчика положения. Винт на
ИИ (пп £о + ЭИНЭИ01ГЯ10 эои -qifsmHifouotf) tj | 1 | *n | ||||||
пш (ИИ £о + эинэно1гх1о эои -Ч1ГЭХИИ1ГОио1Г) 1/ | 1 | «л | ||||||
ИИ ( ОП эинэно1гяхо зон -Ч1гахии1гопо1Г)/ | 1 | о | о | |||||
S 2 -с* | ИИ ЭИВЭИ01ГХ -хо ЭОИЧ1ГЭХ -HHifonoU | +1 | MO +1 | +1 | ||||
ИИ эин -эно1гххо эон -Ч1ГЕНИИ0И | t- | 8 m | ||||||
ИИ (ИИ I + ЭИНЭН01ГЯ10 зон -Ч1ГЭ1ИН1Г0Ц01Г) \ц | о.о. | i/ о | о (S | о | ||||
ИИ (Iff on ЭИНЭН01ГЯХ0 эон -Ч1ГЭ1ИН1ГОио1Г) ц | (S | (S | ||||||
1 | (S s | s | ||||||
оо | 00 s | oo | ||||||
X о S | X о (S s | in X о s | ||||||
оо | oo s | о s | ||||||
пп (ИИ 81 + ЭИНЭН01ГХХО эон -Ur3XHHIfOUOir)Zp | о | о oo | g | |||||
ИИ (iy on ЭИНЭН01ГШ0 эон -4If3XHHIfOUOtf) Ip | m | si | ||||||
ИИ (Я on ЭИНЭИ01ГХХ0 эон -Ч1ГЭХИИ1ГОио1Г) ,р | I | i | ||||||
а; | о о оо — | о m | о | i | 8 •л | |||
Q | i | о (S | о | |||||
Н J ИОИЕИН -вхэм эоиэваие -EEd ЭИИЭ1ГИЭД | i | о | i | о | ||||
ЭЭ1Г09 ЭИ JX ЕЭЭЕ) | 00 | oo | (S (S | Si | ||||
ИИ ганес19иэи нх -iraUEE dXSHEHlj | 8 | о | ||||||
1 1 S | cc CO | X с о | XX cc CO | X с о с s s s | XX cc CO | X с о с s s | ||
s s | с s | s s s | s | |||||
не возникает сила, которая воспринимается пружиной. При этом шток перемешается на расстояние, пропорциональное жесткости пружины.
Основными конструктивными элементами механизма являются мембранная пневматическая камера с кронштейном и подвижная часть. Мембранная пневматическая камера механизма прямого действия состоит из крышек I и 3 (рис. 13.13, а), мембраны 2, которые образуют герметичную рабочую полость. Крышка 3 прикреплена к кронштейну 5.
Подвижная часть состоит из опорного диска 4, к которому прикреплена мембрана 2 штока 7 с соединительной гайкой 10, и пружины 6. Пружина одним концом упирается в опорный диск, другим — через опорное кольцо 8 — в регулировочную гайку 9, служащую для изменения начального натяжения пружины и направления движения штока.
Гайка Ю служит для соединения штока механизма со штоком регулирующего органа.
Мембранную пневматическую камеру механизма обратного действия образуют крышка 3, вставка 5 (рис. 13.13,6) и мембрана 2. Крышка 3 и вставка прикреплены к кронштейну.
Пружина одним концом упирается во вставку. Конструктивное назначение остальных деталей аналогично назначению деталей механизма прямого действия.
Максимально допустимое давление сжатого воздуха в рабочей полости механизмов при диаметре заделки 160 мм 0,4 МПа; при диаметре 200 мм и более — 0,26 МПа.
Полный рабочий ход выходного элемента механизма МИМ без позиционера и с позиционером, механизма МИМП с позиционером осуществляется при изменении пневматического командного сигнала от 20 до 100 кПа.
Полный рабочий ход выходного элемента МИМП без позиционера осуществляется при изменении сигнала от 100—130 до 200-230 кПа.
Присоединение пневматических линий к рабочим полостям механизмов и к позиционерам осуществляется при помощи резьбовых отверстий К Ve"-
У прямоходных механизмов шток совершает возвратно-поступательное движение. В зависимости от направления движения выходного звена при повышении давления в рабочей полости прямоходные механизмы разделяются на механизмы;
прямого действия (при повышении да-
вления в рабочей полости механизма присоединительный элемент выходного звена отдаляется от плоскости заделки мембраны);
обратного действия (при повышении давления в рабочей полости механизма присоединительный элемент выходного звена приближается к плоскости заделки мембраны).
Для создания дополнительных усилий на штоке мембранного механизма в случае появления на затворе регулируюшего органа больших неуравновешенных усилий в комплекте с механизмами применяются специальные устройства — позиционеры. Позиционер обеспечивает повышенное быстродействие и точность установки штока мембранного механизма в соответствии с пневматическим сигналом, поступающим от регулятора или управляющего устройства.
Мембранные механизмы комплектуются позиционерами П4-10 и П10-25 (тип позиционера зависит от величины хода штока).
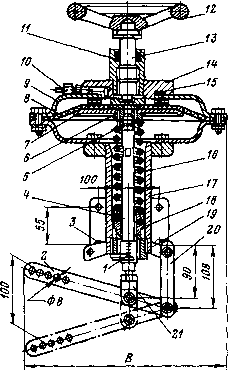
Мембранные нсиолиительные механизмы качающегося действия типа МИМ-К. Общий вид механизма данного типа изображен на рис. 13.14. Давление пневматического командного сигнала воспринимается резиновой мембраной 8, закрепленной между крышками 9. Деформируясь, мембрана через диск 7, втулку 5 и гайку б передает движение штоку 4, нижний конец которого перемещает рычаг 2, соединенный с регулирующим органом. Перемещению штока противодействует пружина 16, упирающаяся в гайку и в фасонную втулку 18 корпуса 17. Перемещения штока зависят от силы, развиваемой мембраной, которая компенсируется сжатием пружины. Положение.штока контролируется по шкале на корпусе /7. Фасонная втулка 18 служит для регулировки числа рабочих витков пружины.
Для повышения быстродействия, точности и создания дополнительных усилий на штоке мембранного механизма в случае по-
D
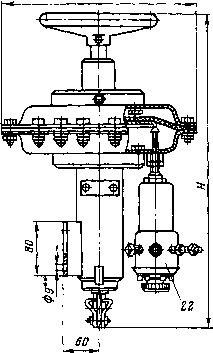
Рис. 13.14. Мембранные исполнительные механизмы качающегося действия МИМ-К; / — шкала; 2 — рычаг; 3 — гайка регулировочная; 4 — шток; 5 — втулка; б — гайка; 7 — диск; 8 — мембрана; 9 - крышки (верхняя и нижняя); /О - гайка накидная; //, /5 - кольцо уплотиительиое; 72-маховик; /3 — винт; /■Z — корпус дублера; 76 — пружина; 77 —корпус; 7S — фасонная втулка; 79, 27 —серьга;
20 - тяга; 22 - позиционер
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15]