 |
 Как обустроить мансарду?  Как создать искусственный водоем?  Как наладить теплоизоляцию?  Как сделать стяжку пола?  Как выбрать теплый пол?  Зачем нужны фасадные системы?  Что может получиться из балкона? |
Главная страница » Энциклопедия строителя
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15]
страница - 14
по третьему классу точности ходовой посадки.
Основными параметрами РО являются диаметр условиого прохода, конструктивная и расходная характеристики.
Диаметр условиого прохода определяет пропускную способность регулирующего органа, которая необходима по технологическим требованиям. Расчет диаметра условного прохода и соответственно выбор типа РО производится в технологической части проекта.
Конструктивная характеристика выражает функциональную зависимость изменения относительного проходного сечения РО от степени его открытия и отражает только конструктивные особенности данного РО, не связывая их с особенностями потока, протекающего через него, а также с особенностями источника регулируемой среды и регулируемого обьекта, т. е.
fpo =/(ipo).
где f РО - проходное сечение йро — степень открытия РО. Так как
(13.1) РО;
Ьро = /(Фим),(13.2)
то выражение (13.1) можно записать в виде
ро = /(Фим).(13.3)
где фим — угол поворота выходного вала ИМ.
Расходная характеристика выражает зависимость расхода регулируемой среды (воды, пара и т. п.) через РО от степени его открытия;
Gpo = f(hpo)-
Расход среды через клапан определяется выражением
Gpo = CFpol/AP,(13.4)
где Gpo - расход среды (вещества); ДР - перепад давления иа РО; С — постоянный коэффициент.
Перепад давления на РО, как правило, изменяется при различных степенях его открытия.
Таким образом, с учетом (13.3) линейность конструктивной характеристики (13.1) РО не достаточна для обеспечения его расходной характеристики (13.4).
Таким образом. При выборе сочленения ИМ с РО задача сводится к тому, чтобы нелинейность зависимости Gpo = /(ДР) компенсировалась выбранной нелинейностью (13.3) и в результате была получена линейная характеристика
V | Ьр\> | 1 | ||||
X | ||||||
ш | ||||||
/ | t | т | ||||
/ | У | г- | ||||
/ | у- | |||||
Рис. 13.17, Графическое определение требуемой зависимости Аро =/(Фим) для получения желаемой характеристики Сро=/(Фим) по фактической расходной характеристике Gpo = = f(ho) регулирующего органа
Gpo = А (Фим),
(13.5)
а в общем случае любая желаемая зависимость
Оро = /(фим),(13.6)
где А — коэффициент пропорциональности.
Задача решается графически следующим образом:
1)во втором квадранте прямоугольной системы координат строится фактическая расходная характеристика Gpo =/(йро) так, как это показано на рис. 13.17;
2)в третьем квадранте строится желаемая характеристика
Оро=/(Фим);
3)по расходным точкам Gpo = /(йро) и Gpo = /(фим) в правом квадранте находится требуемая характеристика йро=/(фим) сочленения, обеспечивающая желаемую зависимость (13.6).
В зависимости от конструкции РО их сочленения можно условно разделить на две группы. К первой группе относятся сочленения ИМ с так 1ми РО, у которых шток соединен непосредственно с рычагом и которые ие допускают передачи иа шток никаких усилий, кроме перестановочных. Ко второй группе относятся сочленения ИМ с такими РО, на которые не влияют и ие передаются на шток усилия, кроме переста-новочиых.Все сочленения могут выполняться по общим кинематическим схемам, ио для сочленения второй группы требования могут быть менее жесткими; эти сочленения могут выполняться по другим кинематическим схемам, требования к которым будут приведены ниже.
В зависимости от кинематической схемы сочленения можно разделить иа два типа: прямые (рис. 13.18 и 13.19) и обратные
§ 13.4 Рекомендации по выполнению сочленений ИМ с регулирующими органами_445
Механичесиие упоры
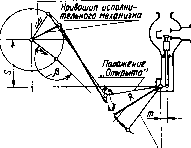
Kpulmun цсполни-телыюго механизма
„Открыта.
наполовину"]
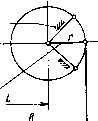
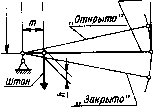
Рис. 13.18. Прямое сочленение исполнительного механизма с регулирующим органом (регулирующий орган ниже исполнительного механизма)
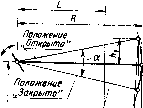
Среднее положение рычага ре-гулируюице-го органа
Положение „Закрыто"
Рис. 13.19. Прямое сочленение исполнительного механизма с регулирующим органом со спрямлением их характеристик (регулирующий орган выше исполнительного механизма)
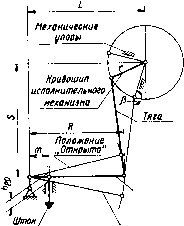
Среднее положение рычага регулирующего оюана
Механичеснив упоры
Hpulouiun \репмнитеяы40№1, нвханизма
Рис. 13.20. Обратное сочленение исполнительного механизма с регулирующим органом со спрямлением их характеристик (регулирующий орган ниже исполнительного механизма)
(рис. 13.20 и 13.21). В сочленениях прямого типа ведущий рычаг (кривошип) и ведомый рычаг (рычаг) регулирующего органа вращаются в одном направлении, в сочленениях обратного типа — в противоположных направлениях.
Выполнение сочленений начинают с определения длины рычага R, при этом
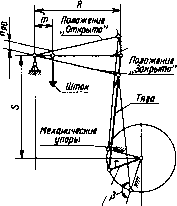
Среднее поломе ние рычага peei/-" лирипшего ореана
Положение „Занрыто"
Рис. 13.21. Обратное сочленение исполнительного механизма с регулирующим органом со спрямлением их характеристик
следует иметь в виду, что угол поворота кривошипа от положения «Открыто» до положения «Закрыто» должен быгь равен 90°:
R = Amr/hpo,(13.7)
где г — длина кривошипа ИМ, см; m — расстояние между осью вращения рычага РО и пальцем, крепящим шток и рычаг, см; йро - рабочий ход РО, см; А — коэффициент, зависящий от расходной характеристики РО.
Все величины в формуле (13.7) определяются по каталогам или данным заводских монтажно-эксплуатационных инструкций на
ИМ и РО. Коэффициент А принимается равным 1,4 при линейной расходной характеристике или близкой к ней и 1,2 при нелинейной расходной характеристике РО, когда требуется ее спрямление.
Для выполнения сочленения рычаг РО устанавливают в положение, при котором РО открыт наполовину (для этого шток РО поднимают на высоту /ipo/2 от положения «Закрыто»). При этом рычаг должен быгь перпендикулярен штоку и, как правило, должен располагаться горизонтально. Далее производится установка ИМ.
Для РО с линейной расходной характеристикой или близкой к ней ИМ устанавливают так, чтобы окружность радиуса г, описываемая кривошипом, касалась перпендикуляра к рычагу РО, восстановленного с линии рычага в положение «Открыт наполовину» (см. рис. 13.18). Кривошип ИМ устанавливают параллельно рычагу РО и в этом положении их соединяют тягой. Далее производится установка механических упоров и концевых выключателей в соответствии с положениями «Открыто» и «Закрыто» РО.
В зависимости от расположения оборудования может быть выполнено как прямое, так и обратное сочленение. Расстояние L по горизонтали между осями вращения рычага РО и кривошипа ИМ для прямого сочленения равно R — r, для обратного — R-\-r. Расстояние S по вертикали между осями вращения следует принимать равным (3 — 5) г.
Для РО с нелинейной расходной характеристикой ИМ устанавливают так, чтобы L = R — 0,6г для прямого и L= R + 0,6г для обратного сочленения, а S = (3 — 5)г. Затем рычаг РО устанавливают в положение «Закрыто», а кривошип в такое положение, чтобы угол между ним и тягой составлял 160-170° (см. рис. 13.19 и 13.20). В этом положении рычаг РО и кривошип ИМ соединяют тягой, после чего устанавливают механические упоры и настраивают концевые выключатели.
Как упоминалось выше, требования к взаимному расположению РО и ИМ сочленений второй группы могут быть менее жесткими, и сочленения также можно выполнять по кинематическим схемам, одна из которых представлена на рис. 13.20. При этом следует соблюдать следующий порядок.
Определяют длину рычага РО по формуле (13.7). Для РО с линейной расходной характеристикой рычаг устанавливают в положение «Открыт наполовину», причем угол между рычагом и штоком может отличаться от 90 °. Затем устанавливают ИМ так, чтобы окружность радиуса г, описываемая криво-
шипом, касалась перпендикуляра к рычагу РО, восстановленного с линии рычага в положении «Открыт наполовину». Кривошип ИМ устанавливают параллельно рычагу РО и в этом положении их соединяют тягой. При выполнении этого сочленения значения L и S не регламентируются, длина тяги должна составлять (3-5)с.
Для РО с нелинейной расходной характеристикой рычаг устанавливают в положение «Закрыто», а кривошип ИМ в такое положение, чтобы угол между ним и тягой составлял 160—170°, в этом положении кривошип и рычаг соединяют тягой; исполнительный механизм должен при этом располагаться так, чтобы длина тяги составляла (3 —5)г, а угол между тягой и рычагом 40—140°. Величины Z. и S не регламентируются.
Далее в обоих разобранных случаях устанавливают механические упоры и концевые выключатели в соответствии с положениями РО «Открыто» и «Закрыто».
Могут быть случаи, когда необходимо сочленить ИМ с РО при одинаковом вращательном характере движения. При этом может оказаться, что при угле поворота кривошипа 90° рычаг РО необходимо повернуть на угол а, меньший 90°. В этом случае необходимо и достаточно определить длину рычага РО R. Длина рычага R может быть определена из условия равенства величин h и й, (рис. 13.22). Величина h определяется как
Среднее положение рычага регулирую-щего органа
Механические упоры
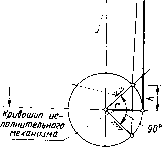
Рис. 13.22. Сочленение исполнительного механизма с регулирующим органом, имеющим вращательное движение рычагов
содержание:
[стр.Введение] [стр.1] [стр.2] [стр.3] [стр.4] [стр.5] [стр.6] [стр.7] [стр.8] [стр.9] [стр.10] [стр.11] [стр.12] [стр.13] [стр.14] [стр.15]